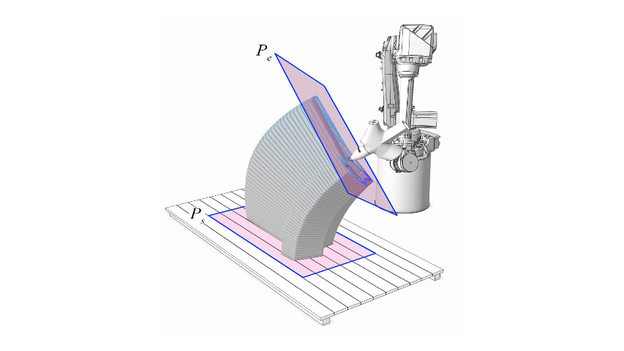
The paper details the toolkit for print-path synthesis and execution that was used in the physical realisation of an arched, bifurcating, unreinforced masonry footbridge spanning 16 metres, composed of 53 blocks of 3D-printed concrete. The printed concrete filaments of every block are placed in layers that are orthogonal to the expected, compressive force flow, resulting in the need for non-parallel, inclined print-path planes, thus also resulting in non-uniform print-layer heights. In addition, the bridge’s global structural logic of stereotomic masonry necessitated the precise coordination of the interface planes between blocks. Approximately 58 kilometres of print-path, distributed over 7800 inclined layers, were generated and coordinated such that the resulting print-paths meet printing-related criteria such as good spatial coherence, minimum and maximum layer thickness, infill patterns etc.
Bhooshan et al. (2018, 2020) describe a Function Representation based schema for inclined-plane print-path generation. We describe the full implementation and extension of the schema for practical and large-batch production. We also implement specific extensions to generate the infill print-paths typically needed in 3D concrete printing. Furthermore, we also describe the refinements incorporated into the print-processing toolkit, subsequent to the discoveries made during the physical realisation of the bridge.
Thus, the custom toolchain that was developed enables print-path synthesis, verification and generation of robotic instructions or so-called GCode. The toolchain and the constituent, standalone applets were designed to enable rapid iteration and refinement, whilst being free of external dependencies. Together, the toolkit provides a blueprint for real-time, printing-aware, interactive shape design. The fast print-processing enabled by the toolkit also makes it a suitable starting point for non-parallel ‘slicing’ of user-defined, input shapes.